在上一篇笔记中,我们初步搭建了ROS开发环境。本篇将聚焦于如何使用轻量级且强大的Visual Studio Code (VSCode) 来开发一个简单的ROS Python节点,并探讨其在计算机软硬件开发中的典型应用场景。
一、 开发环境准备
- 确保基础环境:已安装并正确配置ROS(如Melodic或Noetic版本),且能正常运行
roscore。 - 安装VSCode:从官网下载并安装VSCode。
- 安装关键插件:在VSCode扩展商店中搜索并安装以下插件,它们能极大提升ROS开发效率:
- ROS (by Microsoft):提供ROS工作区检测、消息定义查看、节点启动等核心功能。
- Python (by Microsoft):提供Python语言支持、调试、智能提示。
- CMake Tools (可选,用于C++开发):如果你也进行C++开发,此插件非常有用。
二、 创建一个简单的ROS Python程序
我们将创建一个发布者(publisher)节点,周期性地向一个话题(topic)发布消息。
1. 创建工作空间与功能包(如已存在可跳过):
`bash
mkdir -p ~/catkinws/src
cd ~/catkinws/src
catkincreatepkg myvscoderosdemo rospy stdmsgs
cd ~/catkinws
catkinmake
source devel/setup.bash
`
2. 用VSCode打开工作空间:
`bash
code ~/catkin_ws
`
首次打开,VSCode的ROS插件通常会自动识别ROS工作空间并提示加载。
3. 编写Python节点:
在src目录下的功能包my<em>vscode</em>ros<em>demo中,创建一个scripts文件夹(存放Python脚本的惯例),然后新建文件simple</em>publisher.py。
`python
#!/usr/bin/env python3
import rospy
from std_msgs.msg import String
def talker():
# 初始化节点,节点名称为'talker'
rospy.initnode('talker', anonymous=True)
# 创建一个Publisher,发布到'topicdemo'话题,消息类型为String,队列长度为10
pub = rospy.Publisher('topicdemo', String, queuesize=10)
# 设置发布频率为1Hz
rate = rospy.Rate(1)
count = 0
while not rospy.is_shutdown():
# 准备要发布的消息内容
hellostr = "Hello ROS from VSCode! Count: %d" % count
rospy.loginfo(hellostr) # 在终端打印日志信息
pub.publish(hello_str) # 发布消息
rate.sleep() # 按照设定频率休眠
count += 1
if name == 'main':
try:
talker()
except rospy.ROSInterruptException:
pass
`
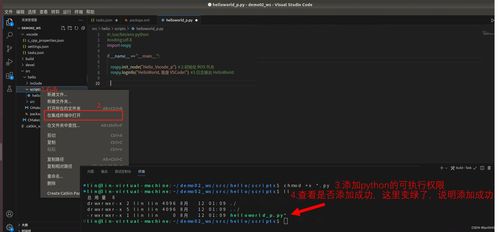
4. 设置文件权限(在终端中):
`bash
cd ~/catkinws/src/myvscoderosdemo/scripts
chmod +x simple_publisher.py
`
- 在VSCode中运行与调试:
- 运行roscore:可以打开VSCode内置终端(
Ctrl+),运行roscore`。
- 运行节点:在另一个终端中,确保已
source devel/setup.bash,然后直接运行rosrun my<em>vscode</em>ros<em>demo simple</em>publisher.py。你将看到每秒输出一条日志。
- 使用ROS插件运行:VSCode左侧活动栏的ROS视图可以列出所有节点,部分插件支持右键直接运行节点。
- 调试:利用VSCode强大的Python调试器,可以设置断点、单步执行、查看变量,极大方便了复杂逻辑的调试。
三、 在计算机软硬件开发中的应用简析
这个简单的例子背后,体现了ROS在复杂计算机软硬件系统开发中的核心价值:
- 软件层面 - 分布式与模块化:
- 进程解耦:发布者(
talker)和(未来可创建的)订阅者(listener)是完全独立的进程,通过话题(topic_demo)进行异步通信。这种松耦合设计使得各个功能模块可以独立开发、测试、部署和复用。
- 语言中立性:发布者用Python编写,订阅者完全可以用C++、Java等编写,ROS中间件负责处理跨语言通信。这允许开发者为不同模块选择最合适的编程语言。
- VSCode作为统一IDE:提供代码编辑、项目管理、版本控制(Git集成)、调试一体化环境,提升了复杂软件项目的开发效率。
- 硬件层面 - 抽象与集成:
- 硬件抽象层:在真实的机器人系统中,
simple<em>publisher.py发布的数据可能来源于一个具体的硬件传感器(如激光雷达、摄像头)。ROS提供了各类传感器的驱动包,将这些硬件数据统一封装成标准的ROS消息格式(如sensor</em>msgs/LaserScan),向上层应用提供了一致的接口。
- 硬件控制:反之,一个订阅控制命令的节点,可以将收到的
geometry_msgs/Twist类型消息(包含线速度和角速度),通过ROS驱动包转换成具体的电机驱动指令,从而控制底盘运动。
- 仿真与实机无缝切换:利用Gazebo等仿真工具,可以在没有物理硬件的情况下,使用完全相同的ROS话题和消息接口进行算法开发与测试(软件在环)。验证通过后,只需切换话题的数据来源(从仿真器到真实传感器驱动),即可部署到真实机器人(硬件在环),这极大地保护了硬件并加速了开发周期。
通过VSCode开发一个简单的ROS Python节点,我们不仅熟悉了基础的开发流程,更重要的是,可以管中窥豹,理解ROS如何通过其通信机制(话题、服务、动作等)将复杂的机器人系统拆分为多个可独立管理的模块。这种架构完美契合了现代计算机软硬件协同开发的需求:软件上追求高内聚、低耦合和高效开发调试;硬件上追求标准化接口、快速迭代和仿真验证。掌握VSCode与ROS的结合,将为机器人、自动驾驶、物联网等领域的软硬件系统开发提供强大助力。
---
下一步建议:尝试创建一个订阅topic_demo话题的订阅者节点,并使用VSCode的调试功能观察消息传递过程。